Radyo Kontrollü Kumanda (RC) ile Arduino Kullanımı
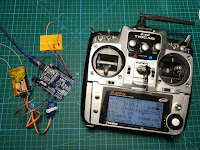
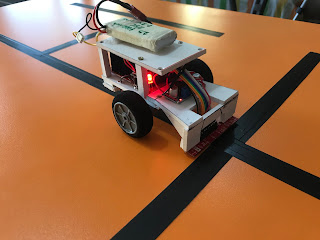
Bu projede sizlere radyo kontrollü araç kumandası ile arduinoyu nasıl birlikte kullanabileceğimizi ve bu sayede uzak menzillerden karmaşık robot projelerini nasıl yönlendirebileceğimizi açıklamaya çalıştım. Umarım sizler için faydalı bir kaynak olmuştur. Gerekli Malzemeler: 1 Adet RC Kumanda 1 Adet uyumlu ve bind edilmiş RC Alıcı 1 Adet Arduino kontrolcü 1 Adet SG90 servo (herhangi bir servo olabilir) 1 Adet Led ve 220Ohm direnç 5v Kaynak Jumper Kablo vs. Devre Şeması: Ekleniyor Arduino Kodu: #include <Servo.h> //motor pinleri #define MotorL1 9 #define MotorL2 10 #define MotorLE 6 #define MotorR1 7 #define MotorR2 8 #define MotorRE 5 //alıcıdan arduinoya aldığımız kanallar const int ch1=A1; const int ch2=A2; const int ch4=A3; const int ch6=A4; //gerekli değişkenleri tanımladık int servodeger; int leddeger; int ilerideger, motorileri, motorgeri; int donusdeger, motorsag, motorsol; Servo servom; void setup() { Serial.begin(9600);...