EEZYbotARM Robot Kol Projesi ve Arduino ile Hafızalı Hareket Kontrolü
Merhabalar, bu videoda thingiverse 3d model veritabanı sitesinden indirdiğim ve 3d printer ile bastığım EEZYbotARM robot kolunun kullanımı ve arduino kullanılarak kolun hareketlerinin hafızaya alınıp otomatik olarak döngü halinde hareket ettirilmesi ile ilgili bir proje yapmaya çalıştım. Video sonuçta biraz uzun oldu ancak detaylı olarak anlatmaya çalıştım. Umarım beğenirsiniz. Eğer beğendiyseniz tabii ki beğen butonuna tıklamayı ve lütfen kanalıma abone olmayı unutmayınız :)


Thingiverse 3d model linki
Montaj Aşamaları
Arduino Kodu
MiniRobotKol
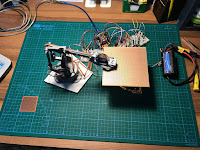
Devre Şeması

Gerekli Malzemeler



Thingiverse 3d model linki
Montaj Aşamaları
Arduino Kodu
MiniRobotKol
Devre Şeması

Proje Videosu
Gerekli Malzemeler
1 adet arduino kontrolcü
4 adet 10k potansiyometre
2 adet buton ve 2 adet 10kohm direnç
1 adet led ve 1 adet 220ohm direnç
Jumper kablo, breadboard vs.
3d basılmış veya hazır tedarik edilmiş robot parçaları
4 adet Tower Pro MG90S servo
7 adet M4 fiber somun
15 adet M4 pul
7 adet M3 somun
1 adet M3 x 30 vida
2 adet M3 pul
4 adet M3 x 12 vida
2 adet M3 x 12 vida
2 adet M3 x 20 vida
5 adet M4 x 20 vida
4 x 3 x 22mm ve 4 x 3 x 24mm metal çubuk



kodları koymamışsınız hocam
YanıtlaSil